蓝狮动态
咨询热线
400-123-4657QQ:1234567890
传真:+86-123-4567
邮箱:admin@youweb.com
混合动力汽车能量管理策略怎样设计?
混合动力能量管理策略,动态规划怎样设计
混合动力汽车的能量管理(energy management)说到底其实就是电池电量的管理,虽然有很多细节需要推敲,但中心思想其实很简单,维持电量在一个目标值,并防止过度充电和过度放电。
维持电量的能量管理策略核心是根据电池大小和混动类型设计一个需要维持的SOC值,然后高于这个值就尽可能让电池放电,低于这个值就尽可能给电池充电,离设计的SOC值越远,充放电量越高。
防止过度充电的策略是当SOC过高时限制电池的充电功率,防止电池的SOC高于一定值。这里有一个注意点是当SOC过高且汽车一直在下坡时如何防止过充电,一般的策略是关闭动能回收,拉高发动机转速通过发动机制动来提供减速度。然而有些混动架构比如串联式混动的发动机无法提供发动机制动,其实就只能让驾驶员踩刹车来规避问题了。然而如果碰到一个会让刹车产生热衰减的长坡呢?目前我个人认为无解。
防止过度放电很简单,SOC过低直接限制整车输出功率就好了,问题在于爬坡爬到一半没电了怎么办,个人认为除了把发动机功率选大一点以外靠发动机来满足爬坡需要的功率以外也没有什么好办法。
本质上是花最少的钱出最多的活。
一般是基于瞬态的动态规划,每个循环loop根据tm/isg和eng的分配的功率或者扭矩关系,分别得到对应的经济代价,所有的代价加起来取最小值的情况,即为此时的计算结果,也就是能量分配。
动态规划下怎么分配功率或扭矩?可以假设以tm为主的工况下,tm从最小值开始算起,eng的扭矩大概等于归一化的总扭矩减去tm扭矩;以此类推可以得到N组扭矩分配,一直到tm最大扭矩处。
怎么计算经济代价?其设计思路是给电和油定价,觉得此时不该用电时可将“电价”调高,“油价”调低,相反亦然。比如soc过高是不希望继续充电,此时调低“电价”调高“油价”,为了满足需求功率或扭矩需要用更多的电,此时soc自然会快速降低,如soc较低低则希望调高“电价”,此时也更少的用电,soc消耗会减少很多最终朝着提高soc的方向发展。
价格的高低的专有名次来自“等效因子”。
此时的tm最大最小扭矩的获取需要考虑的情况比较多,包括自身限制、充放电限制、电池功率限制等;对于eng同样如此。
得到的最优能量分配并非最终结果,下游模块还要考虑外部输入,动态管理,功率超限等。
以上为能量管理的设计思路。
混合动力汽车是使用内燃机和电池两种动力方式驱动的车辆,混合动力汽车的出发点是提高能源效率和减少排放污染,数据显示在不考虑驾驶性能的前提下,重度混合动力汽车可实现降低燃油消耗 40% ,插电式混合动力汽车则可实现减少燃油消耗 50% 以上,这一切都不开能量混合动力汽车高效的管理系统。
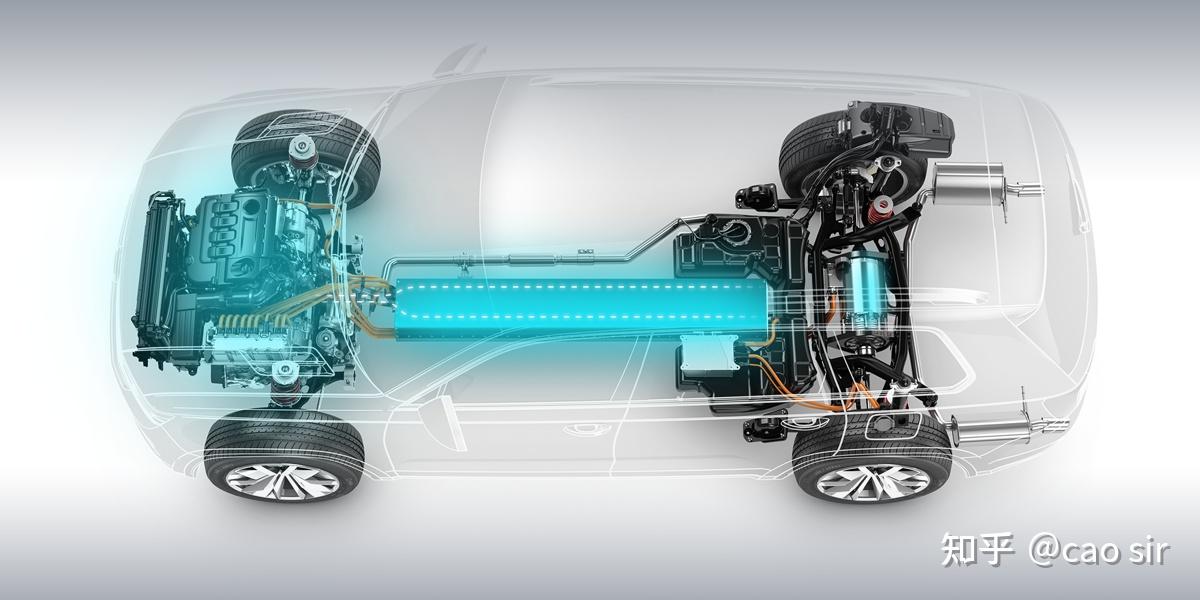
混合动力汽车能量管理系统是在综合考虑电源荷电状态( state of charge,SOC) 、车辆转矩需求、发动机性能和车速等因素的基础上,控制发动机和电动机的协调运行, 实现需求功率在两个动力源之间的高效分配。
由于能量管理策略是燃油动力系统与电驱动系统实现良好结合的纽带,直接影响整车的动力性、经济性、舒适性和排放,因此是混合动力汽车领域研究的重点和难点!
混合动力汽车能量管理策略主要有基于规则的控制策略和基于优化的控制策略两大类:
基于规则的控制策略
基于规则的控制策略一般是考虑发动机和电机的功率需求、车速和电池 SOC 等参数,依据人工经验等提前设置好工作模式的切换规则,一般用流程图或状态图实现一种模式到另一种模式的转换。通过使发动机和电机运行在最高效率点处实现混合动力系统效率最优,最大限度地发挥 PHEV 的节能潜能。基于规则的控制策略又算法模型特征分为简单规则控制方法(线性系统模型)和模糊逻辑规则控制方法(非线性系统模型)。
从上面可以看出,无论是简单规则还是模糊逻辑,基于规则的控制策略都可以通过查表来实现,算法简单, 实用性强,是实现复杂控制策略的基础,因此在混合动力汽车的能量管理系统中得到广泛的应用。但这种控制方法有一个重要的缺陷,就是算法模型依赖专家经验,不具备良好的工况适应性。
基于优化的控制策略
前面说了基于规则的控制策略里面所有的算法模型已经提前固定好,发动机在相应工况下按照提前设定好的规则(功率需求,车速和电池SOC等输入参数得到运行模式输出结果)进行固定切换,这种切换相对死板,不能实现在非线性、时变和动态的工况下达到最优化的策略。为此,工程提出基于最优化的混合动力汽车能量管理策略。
基于优化的控制方法主要有全局优化和动态优化两类。
在全局优化算法中,动态规划 ( dynamic programming,DP ) 、二 次 规 划 ( quadratic programming,QP) 和变分法( variational method,VP) 等方法都需要预知行驶信息,而在汽车实际行驶过程中,行驶工况是未知的,工程应用有较大难度。
动态规划算法基于逆向推理与正向优化相结合的贝尔曼原理,是搜索能力最好的全局优化算法,但程序结构十分复杂,且在线寻优需要采用模型预测 ( model predictive control, MPC) 算法获取循环工况,增加了计算的时间成本,不满足实车应用的要求。
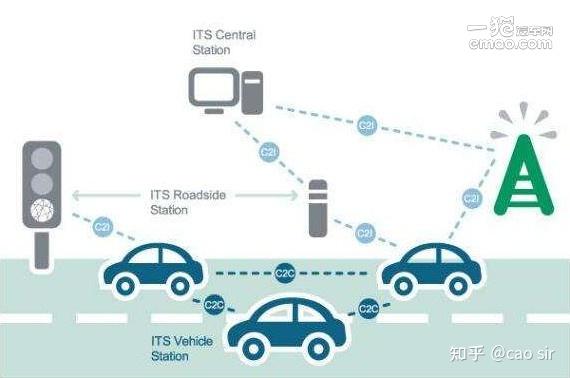
在能量管理策略优化控制中,未来行驶信息对减少能源消耗非常重要,随着车联网技术的发展,云计算成为智能交通的一门新兴技术,可以实现大量交通数据的快速处理和交通信息实时预测,极大地提高了行驶工况和交通数据预测的速度。
利用车辆导航系统( GPS) 、地理信息系统( GIS) 、车联网技 术( V2X) 和智能交通系统( ITS) 等获取交通信息。 一辆 PHEV 能够预知上下坡或交通阻塞发生的时间和地点,控制器就预先规划一个最佳的SOC轨迹,同时调整控制策略,实时交通信息不断地传到车辆能量管理系统用于SOC的规划,有论文数据显示可以提高车辆5%~15% 的燃油经济性。

总之,传统的混合动力汽车能量管理策略的计算复杂度和实时优化性能之间存在矛盾关系,随着车联网、云计算及自动驾驶等技术的发展,将交通信息与 PHEV 动力控制技术整合在一起将进一步优化能量管理策略,提高混合动力汽车的燃油效率!
欢迎关注 @cao sir ,一个专注于汽车控制器、车载芯片,先进电子架构的攻城狮!
谢邀。特邀请FEV动力系统设计团队经理赵梓江作答。
混合动力能量管理策略是混动车型核心的动力系统控制策略,它的覆盖面比较广。计划从以下几方面来和大家交流一下认识和理解。
我们从功能的目标定义来看:
行业内针对这个功能的设计基本上是以基于动力源部件能力,考虑车辆运行状态及需求,合理的管理规划动力执行部件的工作状态为目标,具体的策略开发内容会包括:
1, 计算和保护动力源及执行部件的能力一般为功率特性。这里提到的动力源和执行部件针对不同混动架构可以包括:动力电池,发动机,发电机,驱动电机,超级电容等。
2, 定义和分配不同用电部件的用电功率和优先级。这里用电部件可能会有:启动发电一体机,驱动电机,DCDC,空调,热泵等动力系统中的功率消耗部件
3, 电量管理,针对混动车型中的动力电池SOC消耗和保持,进行优化的充电和放电管理,其中也就关联了发动机启动和模式管理(怠速,串联,并联等)
4, 将整车动力系统相关的能量消耗进行优化管理,基于能耗和效率的角度考虑动力系统运行状态,例如:通过结合车辆的路径规划和地图数据,得到车辆长期和短期的行驶工况预估,基于预估再通过调整当前的混动模式或者档位等,来达到整体行程的能耗最优化控制。
5, 12V电池补电和一些AC,DC对外功率输出等功能。
当前行业内基本上以1-3个分项功能作为能量管理的主要功能进行设计,4-5可能不同的主机厂会基于自身功能架构进行关联或相对独立的划分及开发。
本次我们重点介绍1-3的功能开发认知和经验。
1,针对计算和保护动力源和用电部件的功率,如果要保护就要精确了解当前电池和电机、发动机的能力,否则要么过度保护降低了系统的动力性能力,要么保护不足造成了电池过充或过放、电机过温等问题。
首先我们需要正确的获取零部件当前的状态信息,包括电机,电池,发动机状态。针对电功率接口,其中电池我们需要电池峰值和连续的充放电功率,电池的电压及电流信息作为校验和预测。如果要准确,精细的利用电池和电机的能力,我们还可以基于时间维度进行2S, 10S, 30S的功率性能接口设计,充分利用电池的性能。电机我们也需要机械功率接口扭矩和转速及电功率限制,DCDC高低压侧的电流及电压,充电机的电压和电流及功率限制,发动机的转速及扭矩限制。在这个过程中比较关键的是电池充放电特性,一般情况下,我们会从电池厂家获得部分性能试验数据,同时BMS也会结合温度、SOC、电压等进行演算。但由于车辆驱动情况的复杂性,电池离线反馈的性能不能完全准确的匹配实际需要,过充放及报警问题很常见。所以我们也可以根据电池性能接口的实际可用情况,在HCU中增加电池充放电预估功能,考虑增加对电池充放电预估能力的方法,这样能更好的保护电池性能。
基于动力部件的实际反馈他,我们还要预估下一时刻动力部件如电池的性能变化,因为电池的充放电性能会基于SOC、电压、温度等参数动态变化,我们只有考虑了下一时刻它的潜在能力才能避免过充或过放,我们一般采用考虑基于最大能力和当前实际能力的差值来进行PI控制,避免基于瞬时的过大放电需求导致电池过放。
同样发动机和电机作为执行部件,它们的当前实际功率和功率边界也是需要统计计算的,但电机和发动机的特性相对电池更准确和稳定,我们一般可以在台架实验上获得比较准确的性能功率、扭矩特性数据。我们在计算他们的能力和边界时主要考虑当前系统的环境(电压衰减,电流,实际转速),这些条件可能一定程度影响及改变执行部件的性能。同时我们需要考虑电动-机械的双向转化效率。
基于上述部件的实际及边界能力计算,结合车辆的功率允许需求,我们就可以基于部件的边界能力实际响应驾驶员的功率需求。
2,根据不同的运行场景,发动机是否启动,乘员舱及动力系统热管理工作状态,车辆运行状态(换挡,回收,驾驶模式,充电),可以定义不同场景及不同动力源对象的功率分配顺序。
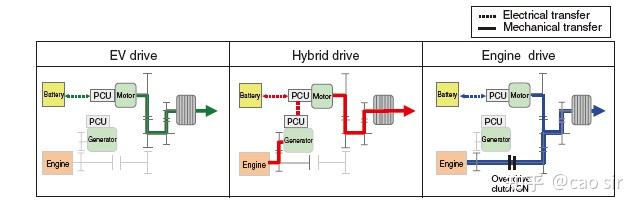
基于不同的动力系统模式,潜在的功率分配也是不同的。纯电驱动只有电池功率会被分配,串联和并联驱动则需要考虑发动机的功率输出叠加电池的功率性能,外接充电则要考虑充电机的功率输出作为边界。我们基于这些运行场景管理消耗部件的功率请求,管理对象不是针对某一个而是要兼顾这个系统的构成,以保证能力需求不超限同时尽可能满足实际部件的需要。
在功率分配的功能涉及上我们是以优先保证系统运行基本保证(DCDC,高压网络损耗),驾驶员驱动优先,舒适性配置稍后的顺序来进行分配。但具体每个运行工况还会考虑实际条件,例如:纯电模式不考虑发动机启动功率预留,低温非换挡也不会考虑换挡功率预留,超车急加速忽略空调系统需求。
3,能量管理还有一个目标是保证动力系统维持一个可用的能量范围及状态。就是通常我们说的维持电平衡保证驱动能力。我们一般会以电池SOC为主,综合考虑车速等其他因素划分不同的电量及功能运行区间,在高电量阶段我们会定义强制/主动放电模式,在这个区间会优先使用纯电驱动及纯电支持各能耗方式,混动助力和发动机发电等模式都会被禁止。在中高电量模式我们会允许纯电助力功能(助力大小取决于发动机工作点和总体需求,还可以进一步具体划分)和效率发电功能。中等电量我们会支持效率发电和发动机最大能力助力(效率发电和相关助力等级定义会根据和发动机沟通的性能划分,区分油耗和排放,NVH等影响而确定),在较低电量我们会启动发动机进行效率发电和紧急发电,用来维持动力系统的SOC不至于持续下降。效率发电和紧急发电可以根据不同车速,不同功率需求及SOC实际和目标的差距进行充电功率的设置,实现不同的充电效果。因此又在这个过程中结合了发动机起停管理的功能,发动机的启动或停止的状态,并根据能量管理的诉求,结合车速、SOC、驱动电机可用扭矩等进行发动机起停控制,进而协助电驱动系统进行驱动和电量补充。
以上是当前主流的能量管理的功能开发内容和基础方案,当然在实际的功能设计和软件开发过程中还有更详细的需求和方案需要被考虑和设计,希望大家可以获得一些启发,同时有不完善的地方恳请指正。
最近接手一个小的单元开发,功能需求未知,已有信息如下:
- 模型的实现功能描述;
- 模型的所有信号输入;
- 模型的所有信号输出;
在以往接收混动能量管理策略的研究时,已有的信息:
- 被控系统的数据(发动机、电机、电池、整车参数用于建立适用于能量管理策略研究用的简易模型);
- 控制目标(实现不同工况、或通勤工况下的能耗最低);
但是,真正到突然要切换到另一个领域时,才发现一些基础理论不清晰导致想要拿以前的理论来应用是如此笨拙。
结合本次开篇的题目,其实是想在一个中期阶段梳理本次过程。
换种表达方式,在混合动力的控制策略中,假设我们已经离线计算出了一个最优的SOC变化曲线。我们现在要做的事情就是,调节lamba因子,将实际SOC控制在最优SOC曲线附近或者始终不超过这个SOC[考虑实际过程,要保留余量,可以根据实际效果来调节或实验标定K_cal_Offset]。
(SOC_Opt-SOC_Real)≥ K_cal_Offset
其中,这里的K_cal_Offset代表一个偏移值,即将实际的SOC_Real控制在SOC_Opt-K_cal_Offset之下;这里的K_cal_Offset 在实际的应用层模型开发时,其实便对应一个标定量;
Error=(SOC_Opt- K_cal_Offset) - SOC_Real
lamba=KpError+KiError*delta
由于lambda和SOC之间的变化关系难以衡量,因此采用PI控制的形式去控制来快速简单的实现控制需求。
虽然,PI是最早接触学习的控制方式,但是大学学的理论与现在的实践需求存在时间上的脱节,导致了实际要应用时的无法快速应用。因此,本次借此机会,从最基本的PID控制器开始,整理实际工作的需求。
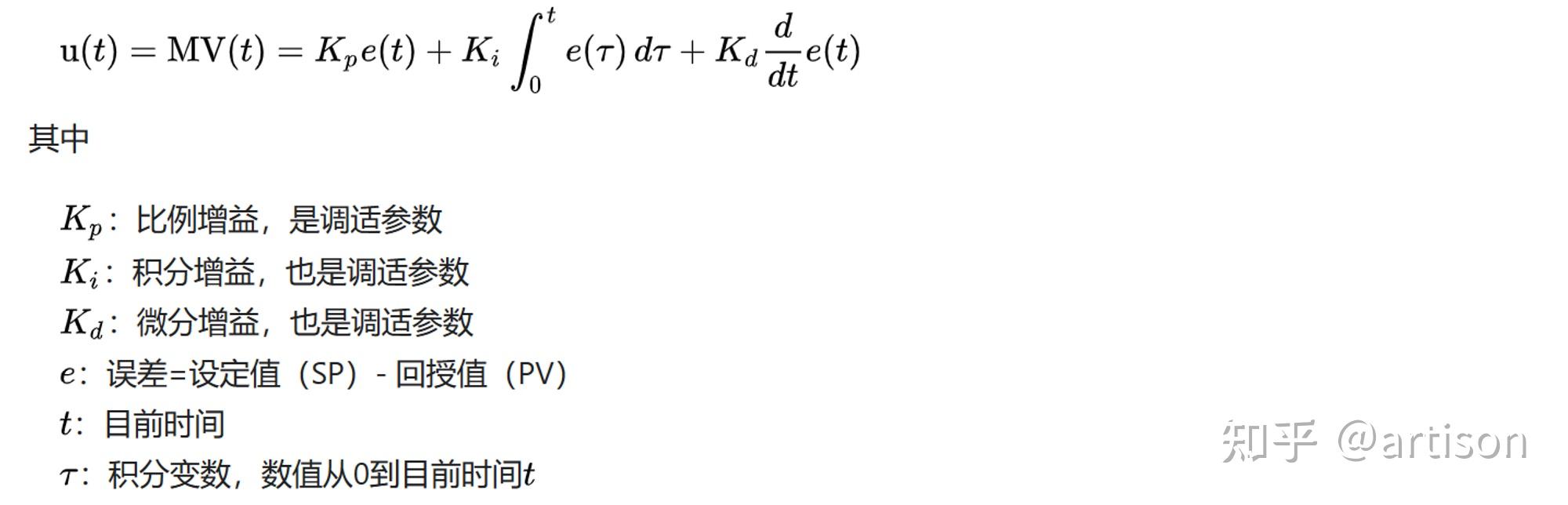
根据WikiPedia的定义[1],如下:
PID控制器(比例-积分-微分控制器),由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)组成[1]。可以透过调整这三个单元的增益(Kp/Ki/Kd)来调定其特性。PID控制器主要适用于基本上线性,且动态特性不随时间变化的系统。
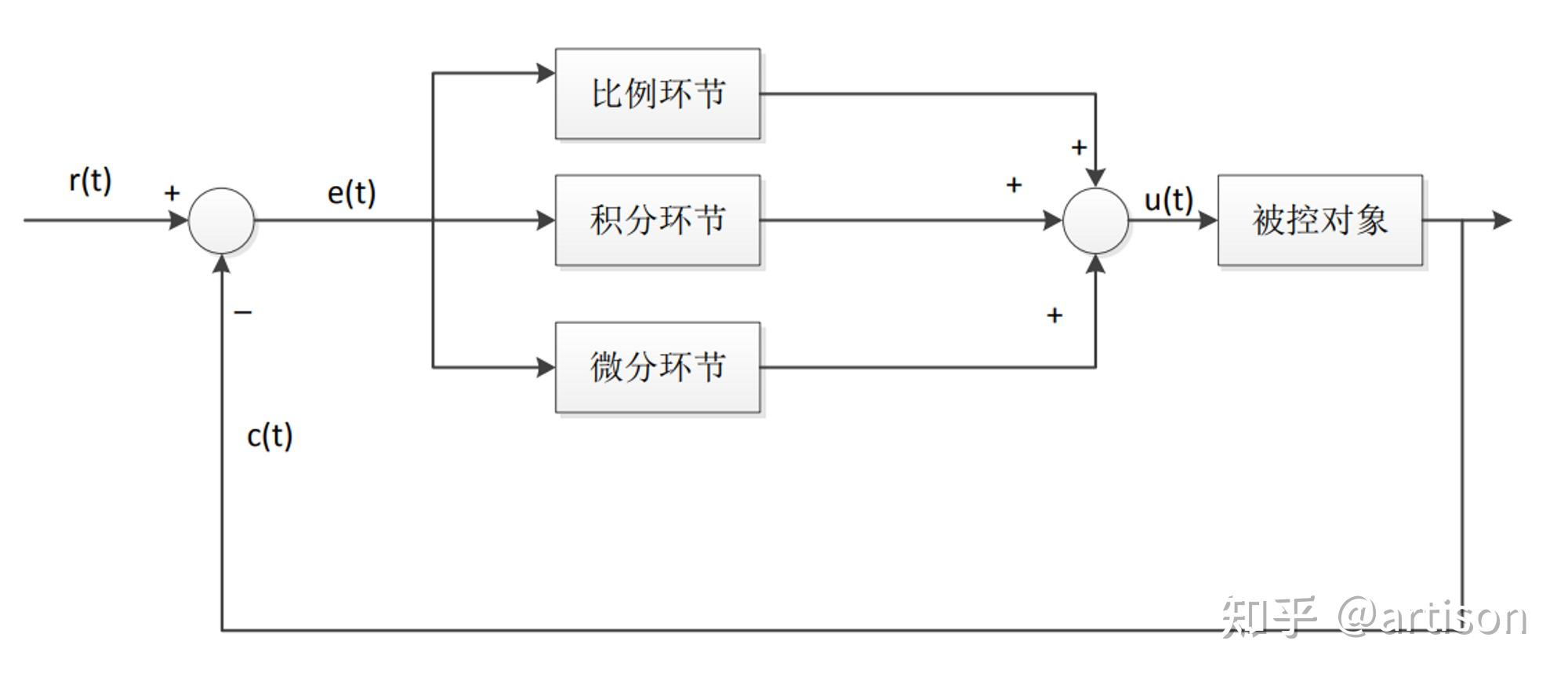
这里有两点需要注意:
- 即PID的适用范围(线性、动态特性不随时间变化)
以实际的电机控制,电机存在转速控制和转矩控制两种模式,PID的输出电压或电流给到电机,电机反馈一个转速或转矩。但是由于外特性的限制,转速或转矩存在上限,且每次的变化步长均有限制条件。这个应用特性,也导致了PID控制器的演化(如:抗积分饱和的PID控制器,anti-windup)
- 上述的误差定义为(参考值-实际值),输出U(t)是根据比例、积分和微分等环节计算得到。但实际上,应用更多的是增量式的PID控制器,即使用PID计算每次的变化步长,对应的公式如下:
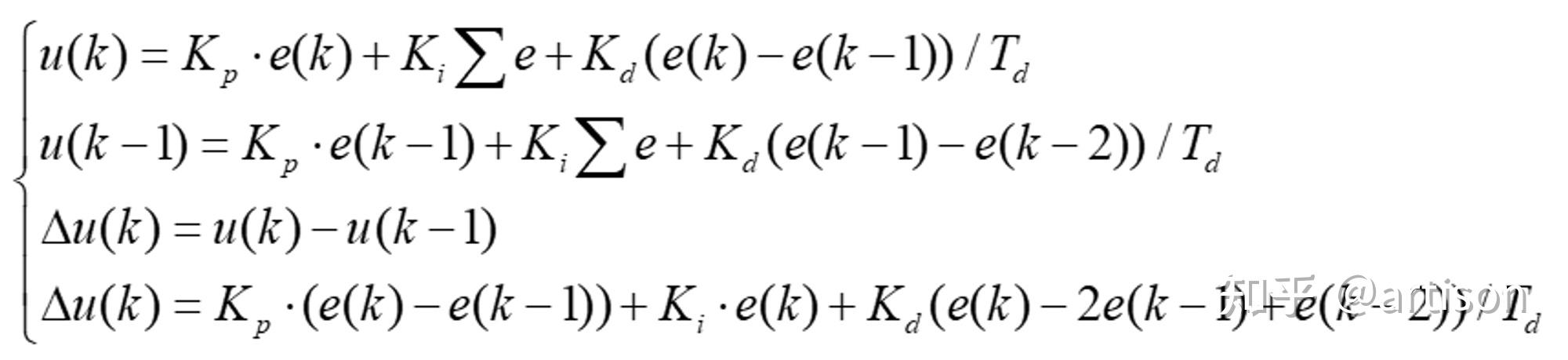
实际应用更多的是,通过PID控制器计算变化步长,即公式(4)
理想情况下,若我们有理论最优的SOC曲线,定义其为SOCOpt,则需要通过调节lamba使得实际SOCreal,贴近此时的SOCOpt;
则有:

这里的偏移量,代表我们留的控制冗余。类似于滑移率控制,如果将其控制在最优,一旦有偏差扰动,可能会使其偏差较大而失稳;
假设我们选择增量式的PID进行调节(结合上述最原始定义来理解):
(1)比例环节:若只有此环节,而无积分环节。当SoC实际值偏离理论最优值,且偏差为固定值,则误差变化率为0,比例环节的修正为0,导致等效因子lambda调节存在问题;
因此,可以看出,比例环节即现在的误差调节,由于最初的调节问题,导致偏差一直存在,则比例环节无能为力;
(2)积分环节:在比例环节无能为力时,根据公式可以看出,积分环节代表了过去一段时间的误差累积。当误差变化率为0时,误差仍然存在,积分环节的存在可以对此部分误差进行修正,来使得等效因子有机会靠近最优值;
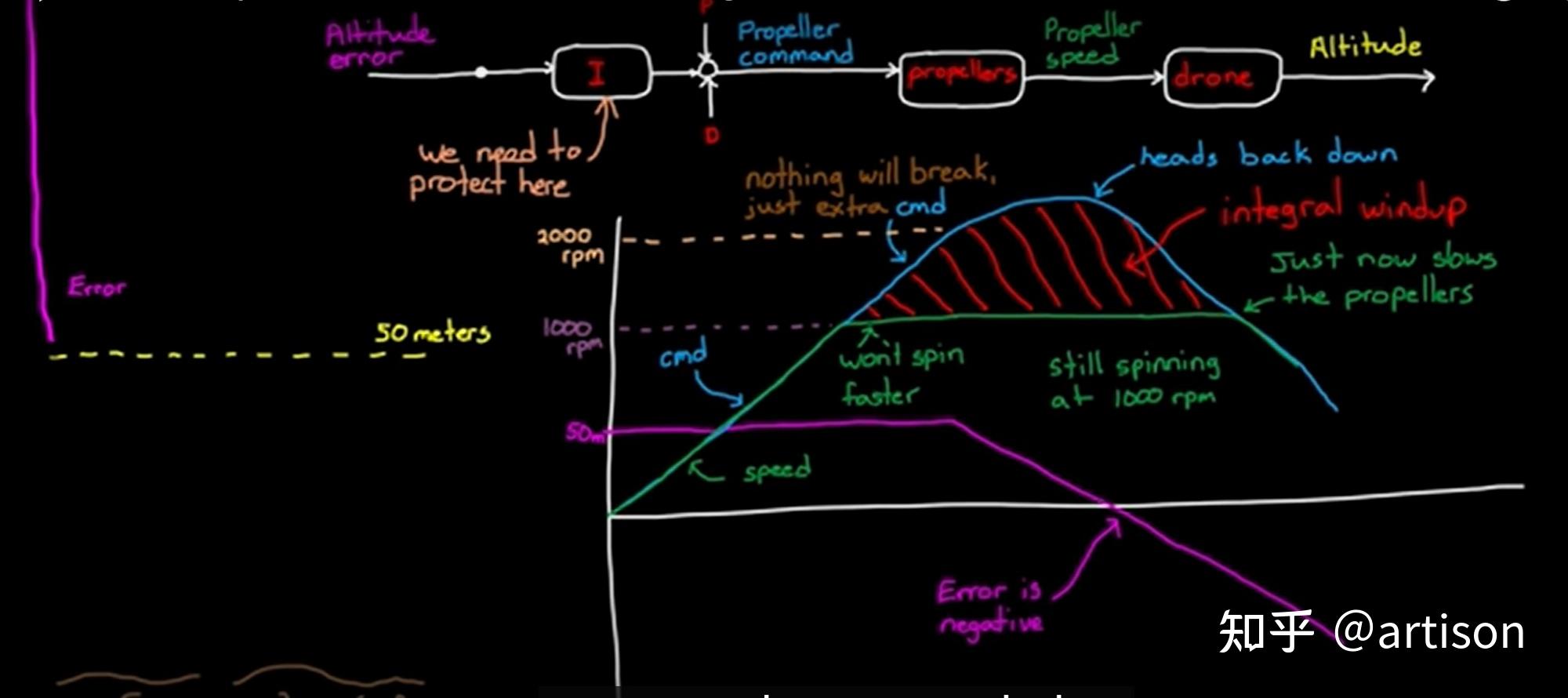
这里请注意,在最开始已经提到了PID控制更多的是针对线性系统,即满足叠加。由于非线性系统存在饱和或者输出限制。因此长期的误差积分,可能会导致PID的输出值超出了被控系统的能力范围(绿色曲线),即积分饱和现象;即此时,误差(粉色曲线)虽然为0或者小于0,但是总体的误差积分值仍然可能是正值,导致PID输出(浅蓝色)仍然为正[2]。
基于MATLAB官网在积分饱和时的课程[2],其中一种抗积分饱和实现,需要如下条件均满足:
(1)PID的输出超出被控系统允许的上下限;
(2)误差符号与PID输出符号一致;
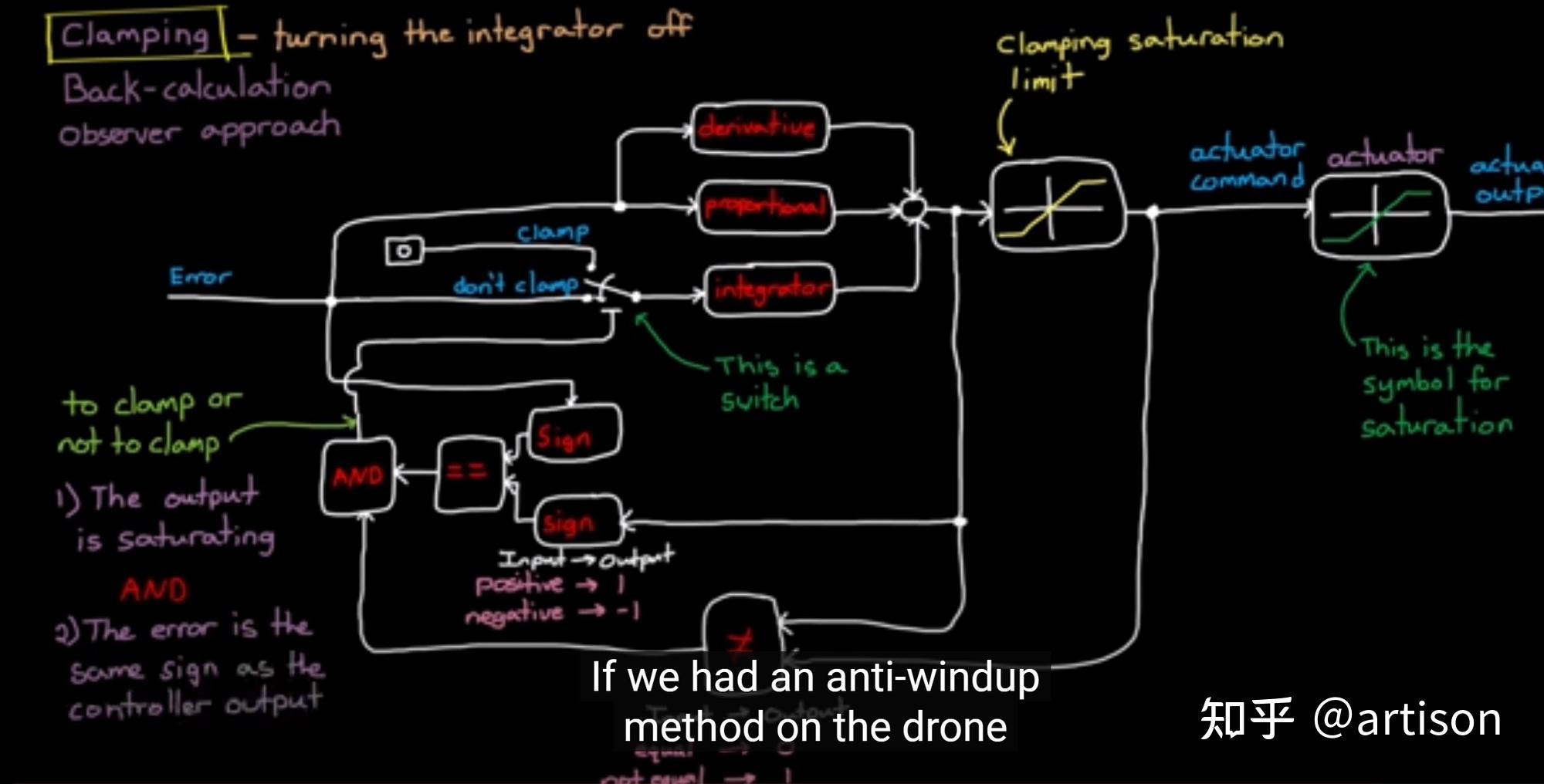
当如上两种条件均成立时,可以将抗积分饱和标志置1,积分环节的输出置0;
这里的积分饱和也有很多不同的实现策略,比如:
- 在PID输出超出上下限时,即将标志位置1,将超出的部分返还至积分环节,削弱这部分的积分累加;
- PID控制器 - 维基百科,自由的百科全书 (wikipedia.org);
- (346) Important PID Concepts | Understanding PID Control, Part 7 - YouTube
- https://controlguru.com/table-of-contents/
- PID控制器在实际的应用层开发整车控制中,可谓是最常用的一种,了解其适用场景、常见问题对更深刻的理解模型开发较为重要;
- 同时,这里只是介绍原理实现和问题,以及结合EMS的场景。具体实现,还需要深入每个条件输入的信号如何获得,来窥探全貌;(比如:如何计算最优的SOC曲线[DP],如何获取当前时刻的目标SOC值[工况识别])
至于PID的Simulink模型的介绍,还是留在下周啦。